工業(ye) 機器人各軸係的水平偏差調整測量
主題
工業(ye) 機器人的程度直接依賴於(yu) 每個(ge) 軸係的調平情況
測量任務
工業(ye) 機器人的各軸係的水平偏差調整測量不僅(jin) 僅(jin) 在生產(chan) 線製造
組裝結束時需要測試,在客戶現場安裝調整後同樣需要測試。
根據測試結果,技術人員在客戶現場進行調整並將誤差補償(chang)
存儲(chu) 到過程控製係統內(nei) 。
解決(jue) 方案
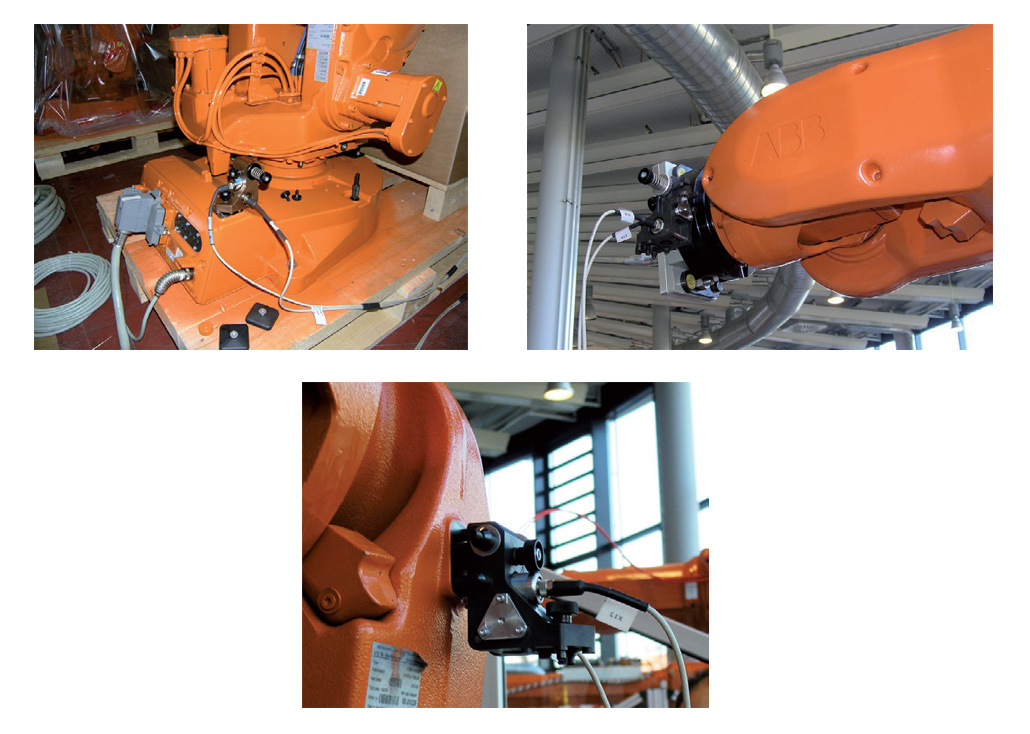
將所有機械手的軸係放置到零位。
配合訂製的2D雙自由度測量傳(chuan) 感器,可以采集該軸係在XY雙
方向與(yu) 工業(ye) 機器人基座參考位上XY雙方向的角度偏差
然後將此誤差補償(chang) 存儲(chu) 到過程控製係統內(nei) 。